

Welcome
The Visual Geometry and Modelling Lab mission is to provide computational tools for the large-scale understanding of data, this being sensed at the nano and up to the macro scale level.
With a privileged focus on image and video data, the main lab goal is to research and apply methods to boost advances of life scientists and engineers in untangling and modelling the (big) data as provided by modern sensors (e.g. high-resolution cameras, time-lapse microscopy, 3D scanners).
The scientific core of the lab is related to the research fields of Computer Vision, Signal Processing and Numerical Optimization with the primary goal to provide algorithms for:
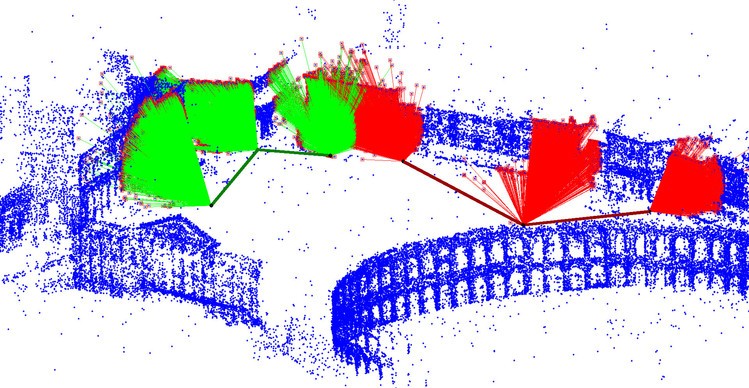
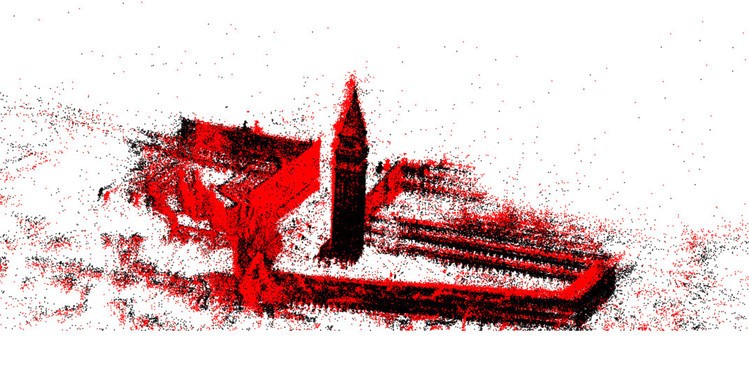
- Reality Capture: 3D reconstruction from images, sound and range data.
- Dynamic scene understanding from sensor networks (video and audio)
- Large scale data clustering and modelling for Life Science and Engineering
These expertise are applied to several practical problems in industry with ongoing collaboration with world-leader companies in machine vision, automation, avionics and photonics.
The Lab has a strong interdisciplinary attitude by combing different methodological approaches to support other IIT departments and labs in problems related to Nanophysics, Neuroscience and Robotics.
Laboratories
Visual-Range-Audio (VRA) sensing lab: the VRA lab is a state of the art infrastructure deploying multi-modal sensing devices. The aim is to provide technology for the extraction of 3D information in any environment using visual, audio and range signals as provided by:
- Visual – 3D scanner based on Photometric Stereo
- Range - Leica C10 scanner, Minolta scanner, Vicon Motion Capture System, RGBD cameras
- Audio – 12 omnidirectional lavalier microphones connected to 12 Radio Frequency transmitters; 12 Radio Frequency receivers; a 12-channel synchronous A/Ds converter
Projects
- H2020-MSCA-ITN-2015 SCENEUNDERLIGHT with OSRAM GmbH and University of Verona
- Avio Aero (Italy): Automatic Visual Inspection and Model Checking for Industrial Automation
- OMRON (Japan): Fast 6D pose estimation from RGB images
Collaborations
- Nanopysics (Vicidomini, Cella, IIT): Super-resolution localisation, dynamic clustering of molecules
- iCub (Natale, IIT): Augmenting the social skills of the iCub through visual understanding
- Instituto Superior Técnico, University of Lisbon (J. P. Costeria): Computer Vision and Art Analysis for Cultural Heritage
- University of Adelaide (Tat-Jun Chin): Autonomous Semantic Analysis of Traffic Scenes
- University of Verona (Marco Cristani): Indoor Scene Analysis for Smart Lighting