Practical Projective Structure-from-Motion (P2SfM)
Abstract
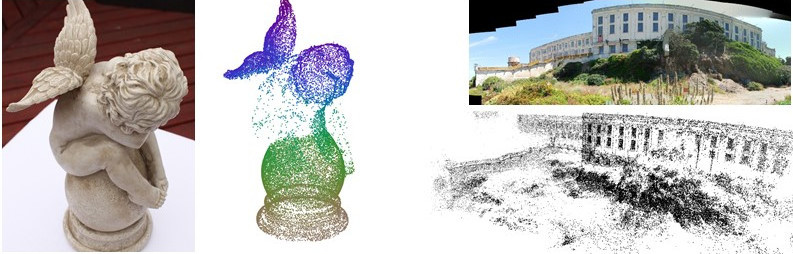
We present a solution to the Projective Structure from Motion (PSfM) problem able to deal efficiently with missing data, outliers and, for the first time, large scale 3D reconstruction scenarios. By embedding the projective depths into the projective parameters of the points and views, we decrease the number of unknowns to estimate and improve computational speed by optimizing standard linear Least Squares systems instead of homogeneous ones. In order to do so, we show that an extension of the linear constraints from the Generalized Projective Reconstruction Theorem can be transferred to the projective parameters, ensuring also a valid projective reconstruction in the process. We use an incremental approach that, starting from a solvable sub-problem, incrementally adds views and points until completion with a robust, outliers free, procedure. Experiments with simulated data shows that our approach is performing well, both in term of the quality of the reconstruction and the capacity to handle missing data and outliers with a reduced computational time. Finally, results on real datasets shows the ability of the method to be used in medium and large scale 3D reconstruction scenarios with high ratios of missing data (up to 98%).
Code download:
https://bitbucket.org/lmagerand/ppsfm/wiki/Home
Dataset:
https://bitbucket.org/lmagerand/ppsfm/downloads/data.7z
Paper:
https://bitbucket.org/lmagerand/ppsfm/downloads/ICCV17.pdf
Reference (if you use code/data please cite our paper):
@InProceedings{Magerand_2017_ICCV,
author = {Magerand, Ludovic and Del Bue, Alessio},
title = {Practical Projective Structure From Motion (P2SfM)},
booktitle = {The IEEE International Conference on Computer Vision (ICCV)},
month = {Oct},
year = {2017}
}