6D Pose of Texture-less Objects (ICRA 2016)
We present a dataset for estimating the 6D pose of texture-less objects from sequences of images. Each object in the dataset is composed of a 3D model (in STL format), and a sequence of images annotated with ground-truth. The ground-truth of each image consists in a rigid body transformation (rotation and translation) representing the 3D motion between the object and the world coordinates systems. These ground-truth poses have been accurately estimated using a VICON motion-capture system.
Installation
Download and unpack the file containing the MATLAB code for using and visualizing the ground-truth (code.tar.gz). Instructions for executing the code and installing the data files are in the README.txt file.
Description of the models
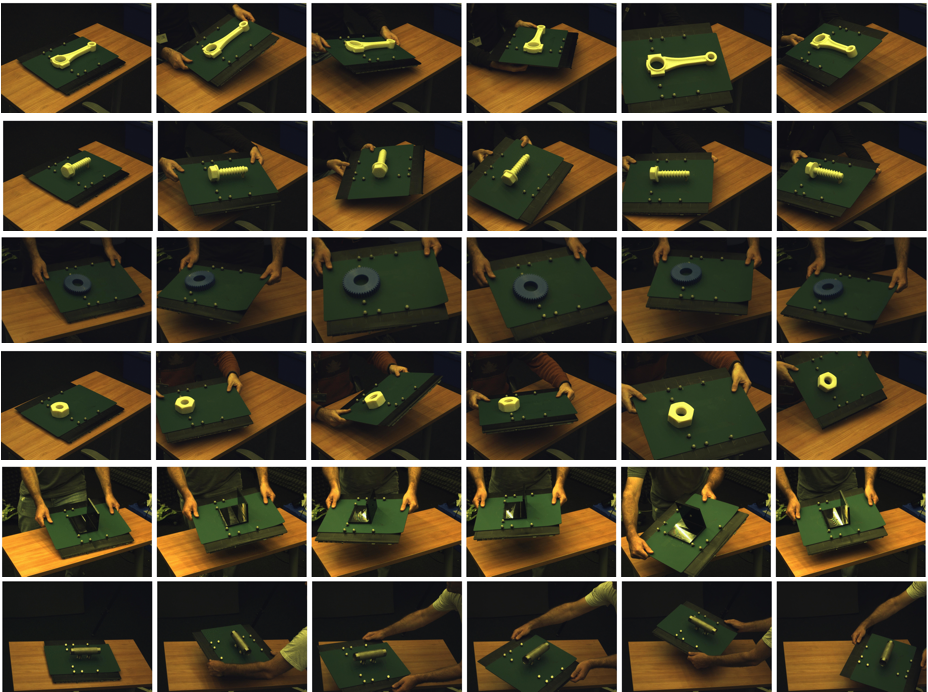
The VGM-6D dataset contains (so far) six objects:
- pistonrod.tar.gz (93Mb) A pistonrod built in white resin.
- screw.tar.gz (53Mb) A hex-head screw made of white resin.
- gear.tar.gz (77Mb) A spur gear manufactured in blue plastic.
- nut.tar.gz (77Mb) A hexagonal nut manufactured in white resin.
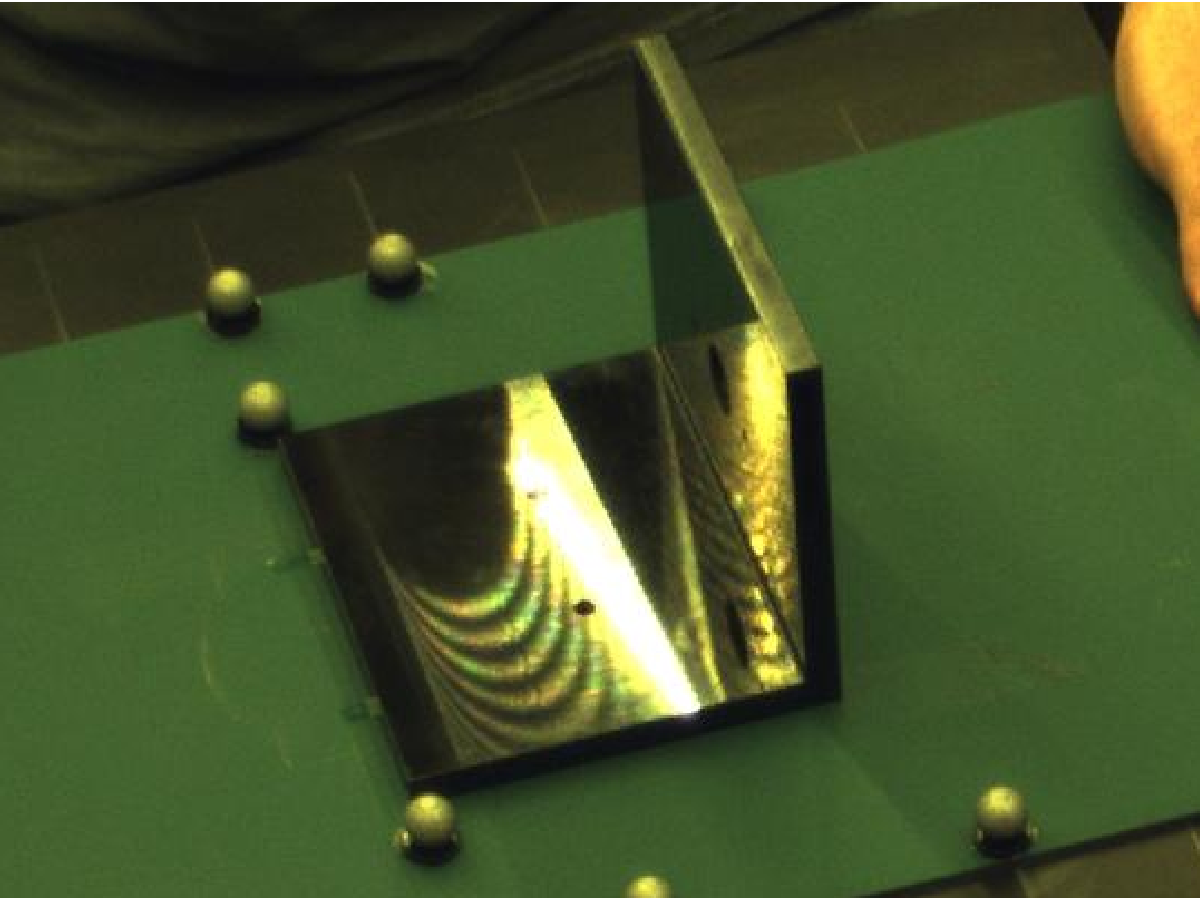
- L-shape.tar.gz (167Mb) A L-shape bracket built in black steel.
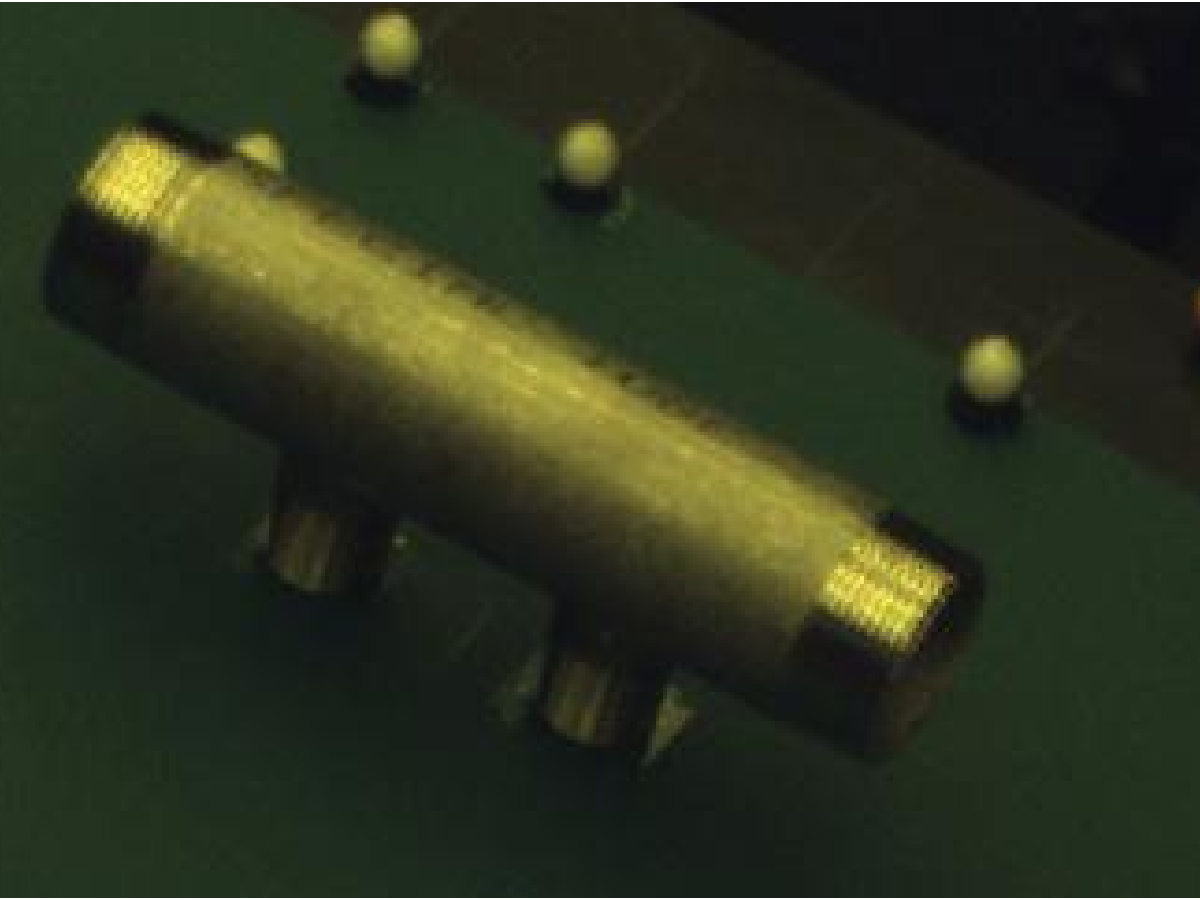
- pipe.tar.gz (121Mb) A chromed pneumatic manifold block.
Please remember to cite our paper if you use the dataset:
@inproceedings{Munoz:etal:icra2016,
author = {Munoz, E. and Konishi, Y. and Murino, V. and {Del Bue}, A},
Title = {Fast 6D Pose Estimation for Texture-less Objects from a Single RGB Image},
booktitle = {IEEE nternational Conference on Robotics and Automation, ICRA},
year = {2016},
month = {May}
}